【図解付きでわかりやすい】ラダー制御の基本「自己保持回路」とは?シリンダー制御の実例付き!
fa-engineer
FAテック ラボ

順序制御の基本を図付きでやさしく解説!
こんにちは!今回もラダー初心者の方に向けて、やさしく解説していきます。
前回は「SET/RESET命令」についてご紹介しましたが、今回はその応用編ともいえる「JMP/STG命令」の使い方です。
まだご覧になっていない方は、先にこちらの記事を読むことをおすすめします。
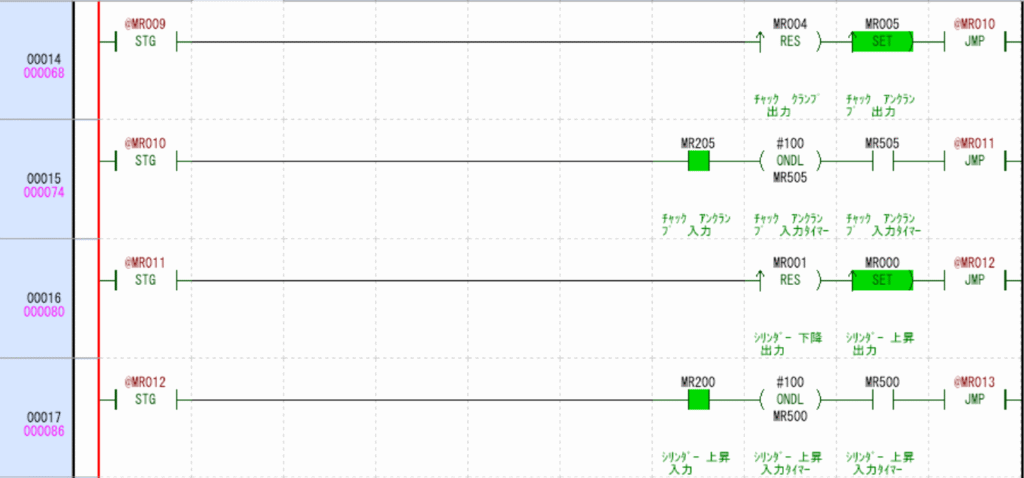
JMP/STG命令は、ラダーでシーケンス制御(順序動作)を作成する際にとても便利な命令です。
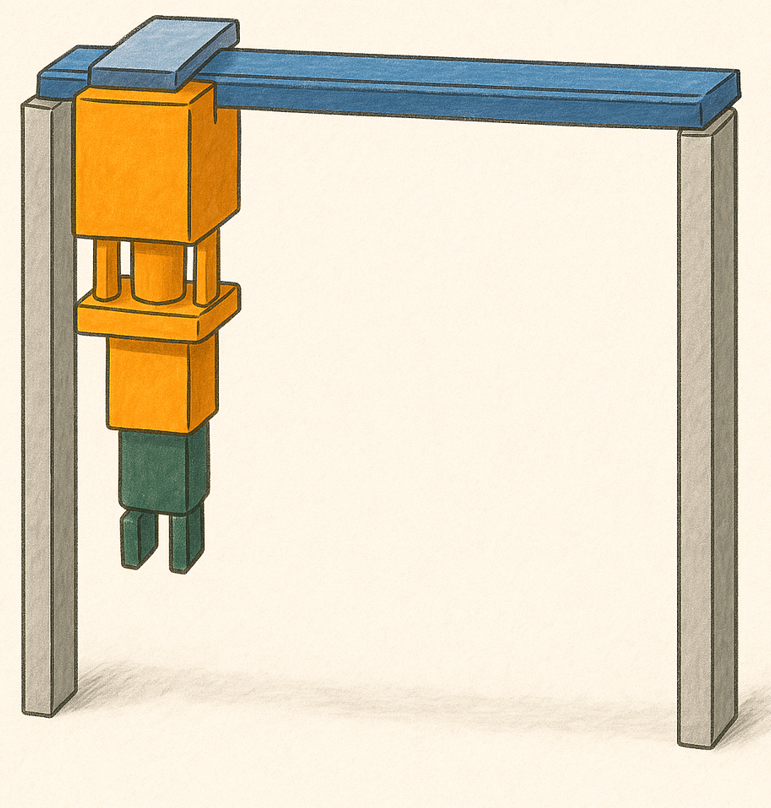
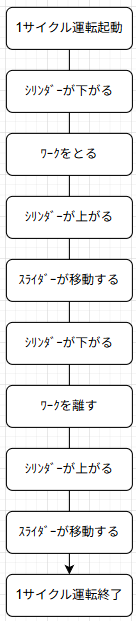
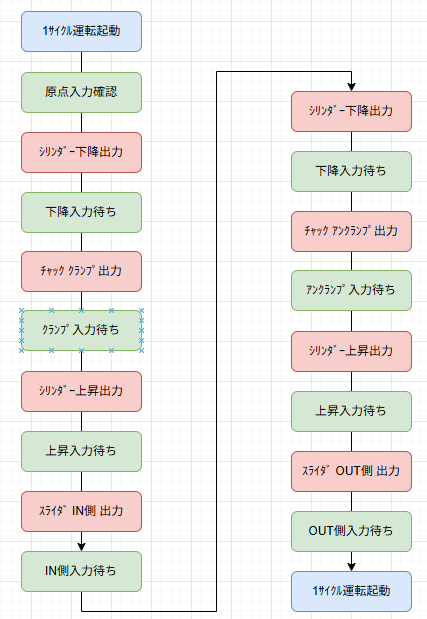
今回は、エア機器を使った1サイクル搬送動作を題材に、図とラダー付きで使い方を丁寧に解説します。
「あらかじめ決められた順番で機器を動かす制御方式」のことです。
この順序制御をJMP/STG命令を使って実現していきます。
| 手順 | 内容 |
|---|---|
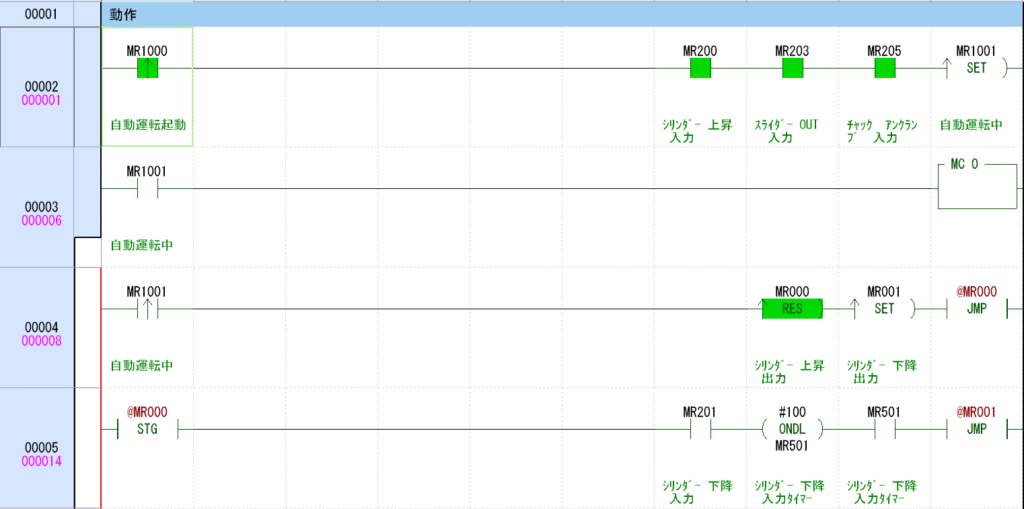
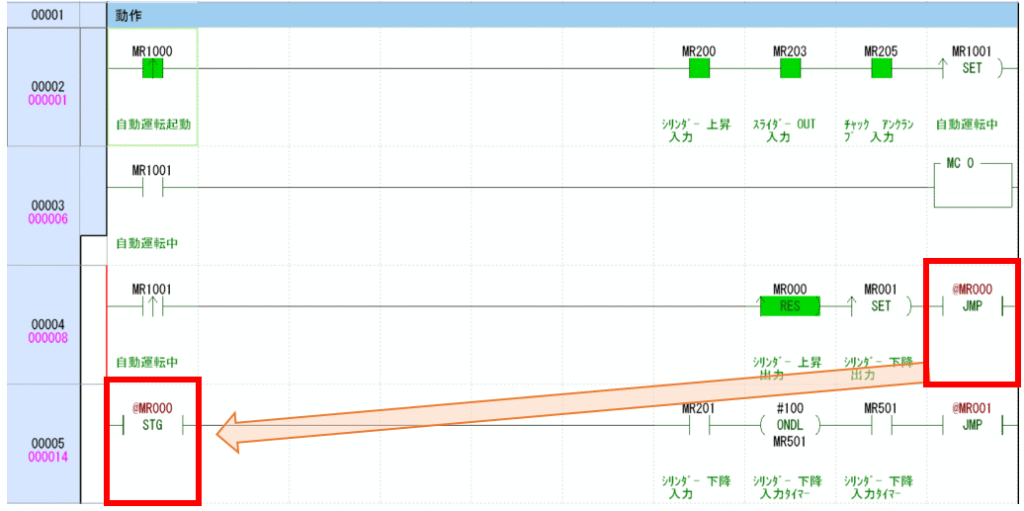
| ① | MC ~ MCR で処理ブロックを囲う |
| ② | 起動条件には LDP(パルス)を使用 |
| ③ | 起動デバイスと MC のデバイス番号を一致させる |
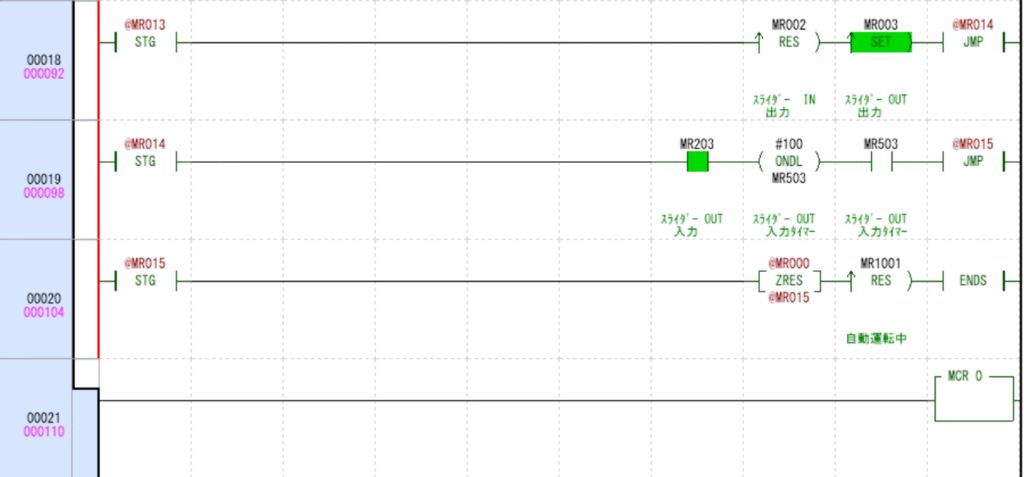
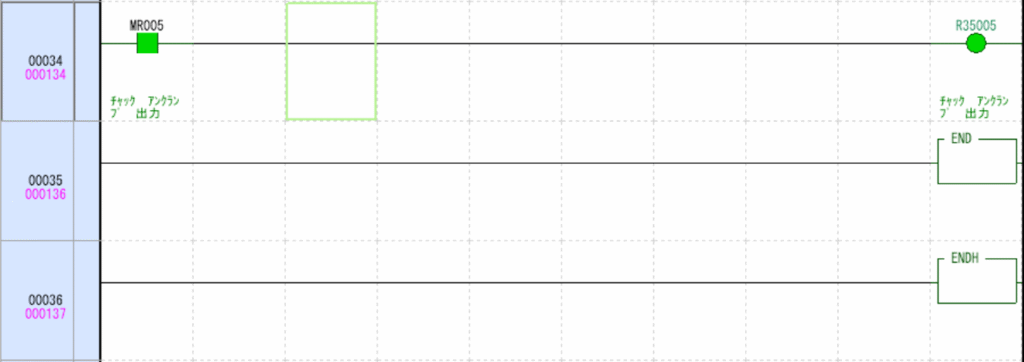
| ④ | 最後に ENDS 命令で終了処理を入れる |
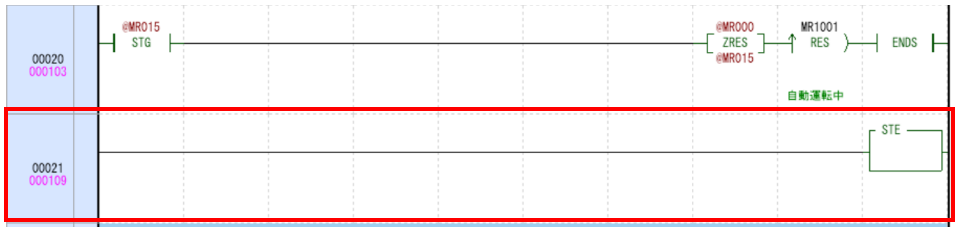
ENDSで終了処理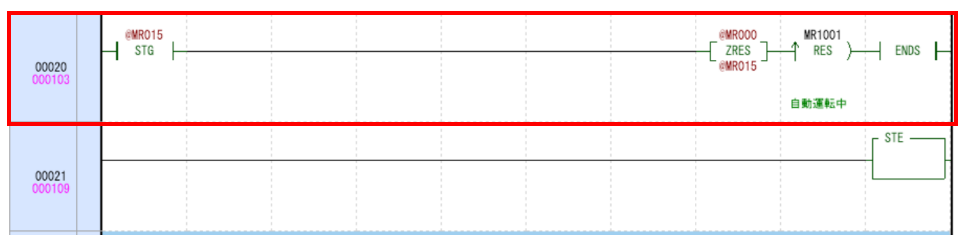
| 命令 | 役割 |
|---|---|
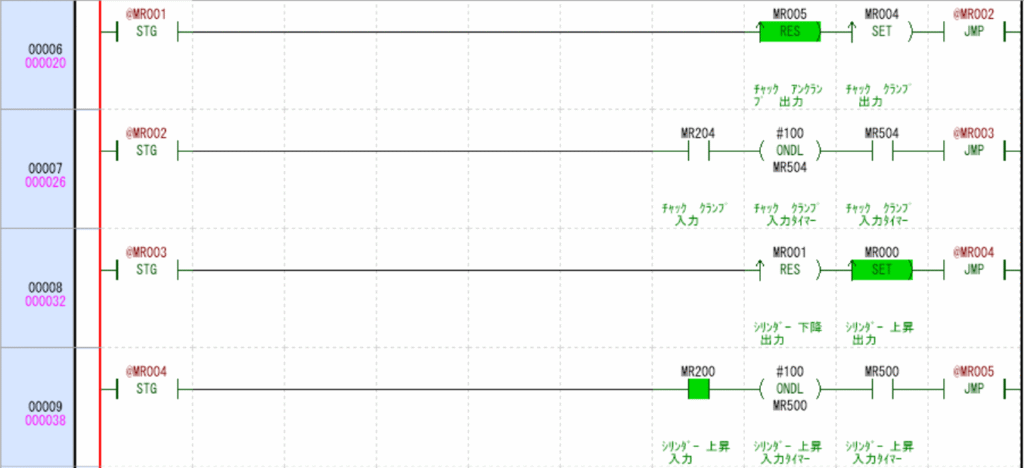
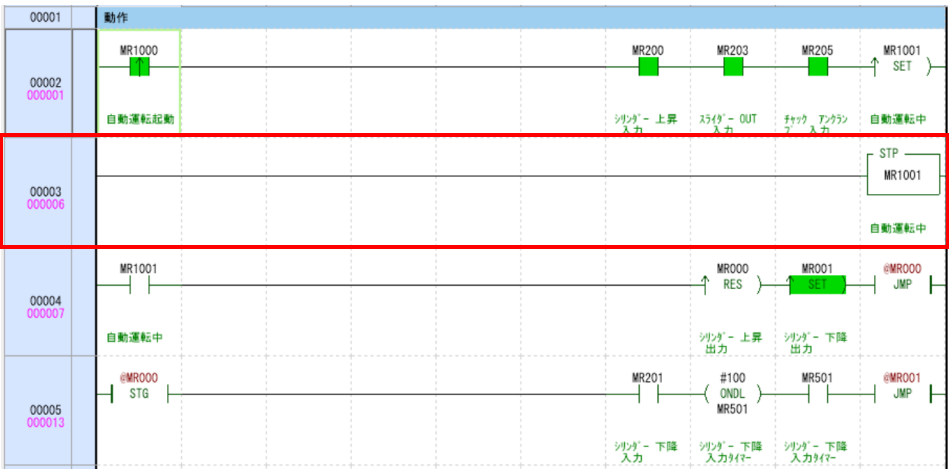
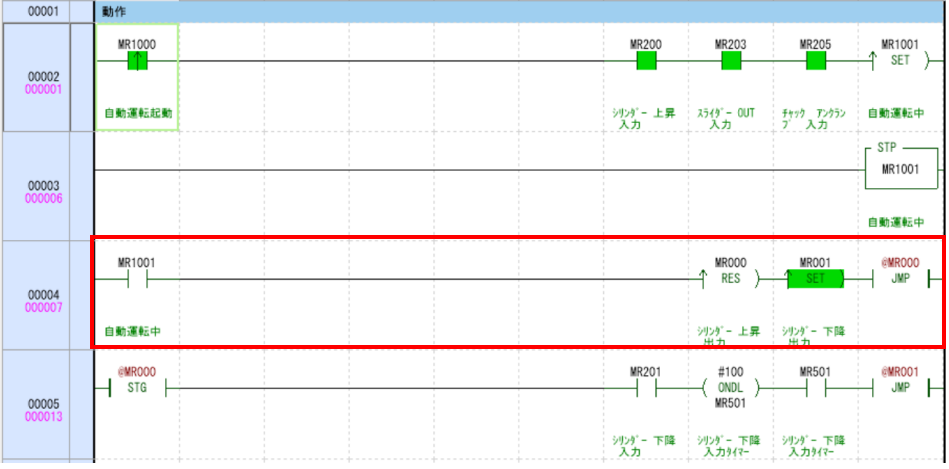
| JMP@MR000 | ジャンプ命令。対応する STG@MR000 に飛ぶ |
| STG@ME000 | ジャンプ先の目印。ここから処理開始 |
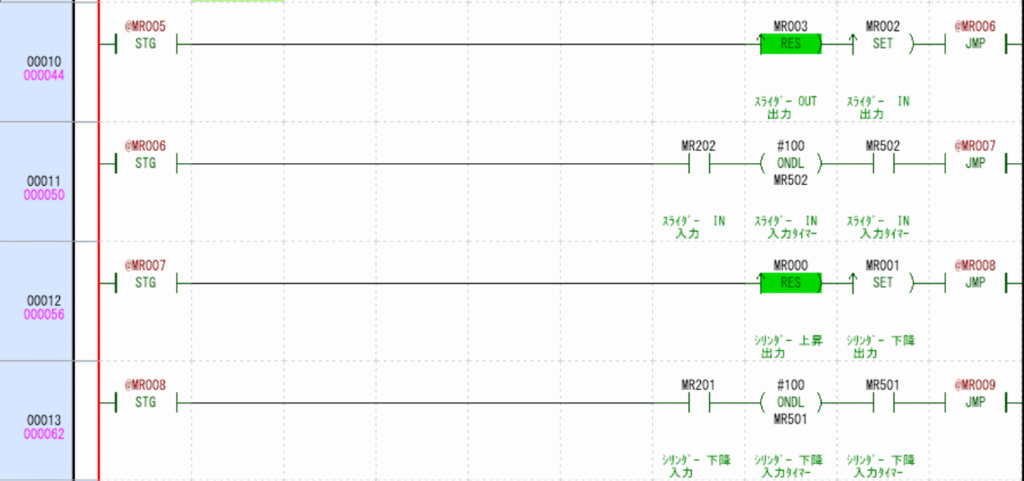
JMPは「ジャンプ命令」、STGは「ジャンプ先の目印」です。
以上、JMP/STGを使ったラダーシーケンス制御の基礎解説でした。
何度かラダーを書いてみると、手順ごとの「見える化」ができてとても便利ですよ!
「JMP/STG」は、一連の動作を順序立てて記述したい時にとても便利な命令です。
ぜひ実際の設備制御でも使ってみてください!