【ロボット制御】FANUCロボット × Keyence PLCでの EtherNet/IP 通信設定
fa-engineer
FAテック ラボ


この記事では Fanucロボット × Keyence PLC を組み合わせて、
「PLCからロボットを自動で起動させる方法」についてわかりやすく解説していきます。
「Ethernet/IPの設定まではできたけど、実際の自動起動ってどうやるの?」
「RSRとかPNSとか聞いたことあるけど、どれを使えばいいの?」
そんな方に向けた内容です。
※Ethernet/IPの設定がまだの方は、先にこちらの記事を読んでおくとスムーズです👇
まずはFanuc側の設定から見ていきましょう。
ロボットを自動で起動する場合、**「どの方法でプログラムを起動するか」**を選ぶ必要があります。
Fanucでは次の4つの起動方式が用意されています。
それぞれの特徴を理解しておくと、システム仕様に応じて最適な方式を選べます。
結論から言うと、私は 「OTHER」方式 をよく使用しています。
理由も含めて順番に解説します。
概要:
UIのRSR1~RSR8信号を使って8通りのプログラム起動が可能です。
プログラム名は「RSR+数字4桁」(例:RSR0001)。
起動手順:
起動したいRSR信号のbitをON → PROD START信号をON。
メリット
デメリット
概要:
PNS1~PNS8の8bit信号を10進数変換して最大255通りのプログラムを起動できます。
プログラム名は「PNS+数字4桁」(例:PNS0001)。
起動手順:
PLC → PNS bit信号+PNSTROBE送信
→ ロボット → 応答信号返送
→ PLC → PROD START信号送信 → 起動
メリット
デメリット
概要:
STYLE1~8のbit信号を組み合わせて最大32個のプログラム登録が可能。
プログラム名は自由に設定できます。
メリット
デメリット
概要:
PLCからのPROD START信号1本で起動できる最もシンプルな方式。
ただし、起動できるプログラムは1つのみです。
メリット
デメリット
「OTHERは簡単だけど1つしか起動できない」
── ここが最大の課題です。
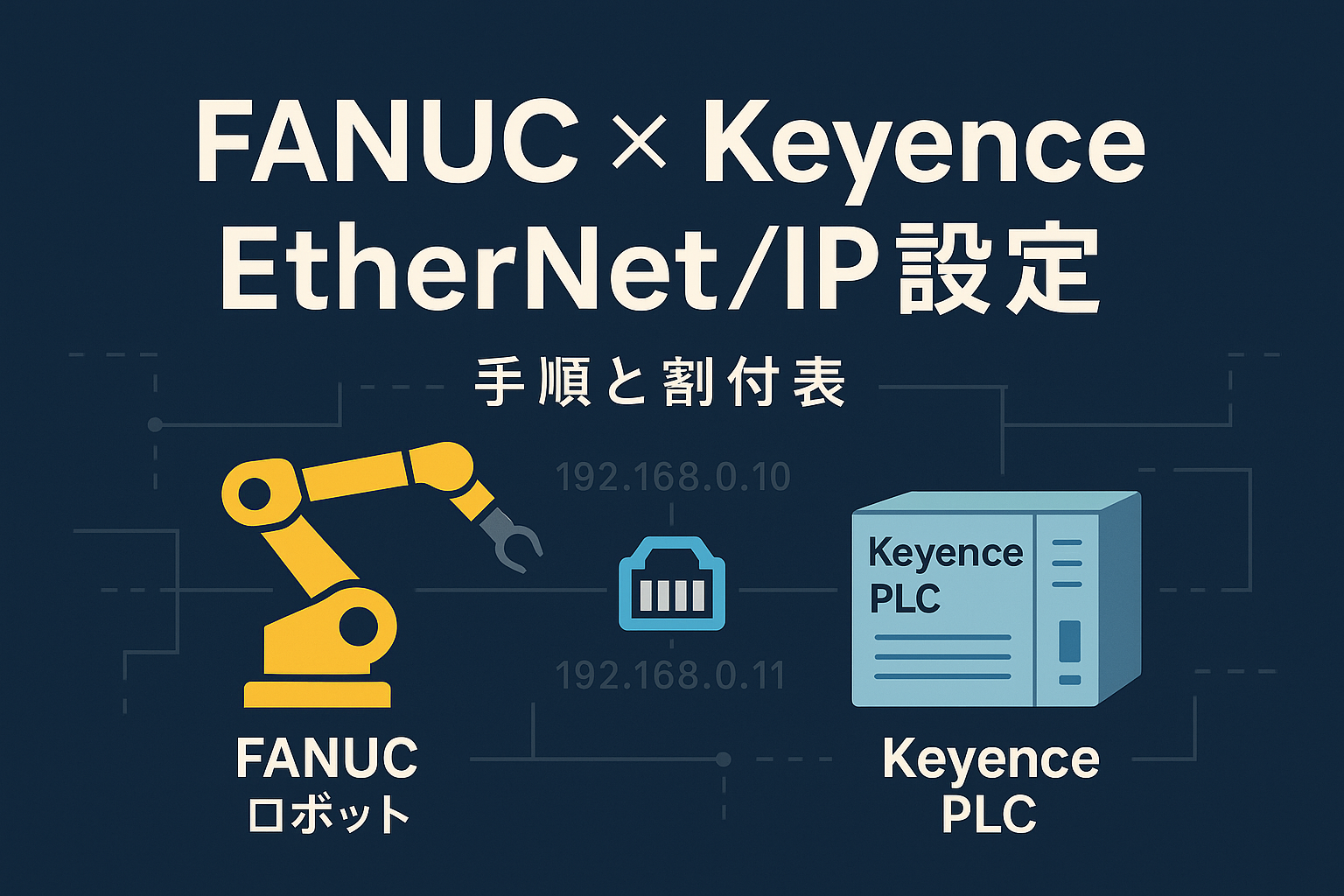
そこで、メインプログラムを“中継”として複数サブプログラムを切り替える構成にします。
構成イメージ:
PLCからPROD START信号を送ると、メインプログラムが起動。
その中で条件分岐し、起動したいサブプログラムを選択して呼び出します。
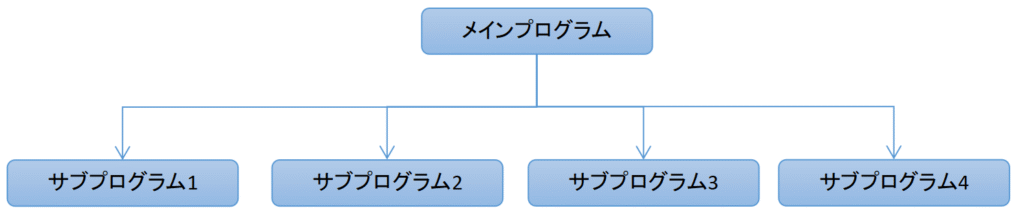
ラベル[1]
モシ GI[1] = 1 ナラ ヨビダシ サブプログラム1
モシ GI[1] = 2 ナラ ヨビダシ サブプログラム2
モシ GI[1] = 3 ナラ ヨビダシ サブプログラム3
モシ GI[1] = 4 ナラ ヨビダシ サブプログラム4
モシ GI[1] = 0 ナラ ジャンプ ラベル[1]
ポイント:
GI[1]はPLCからの入力値。
GI[1]=0のときは上記ループ内で待機。
PLCで番号を書き込んでPROD START信号を送れば、その番号に対応したサブプログラムが起動します。
この方法なら、OTHER方式のシンプルさを維持したまま複数プログラムを切り替え可能になります。
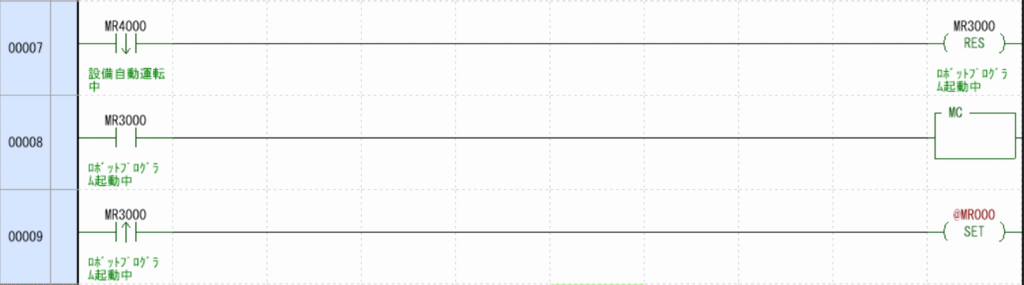
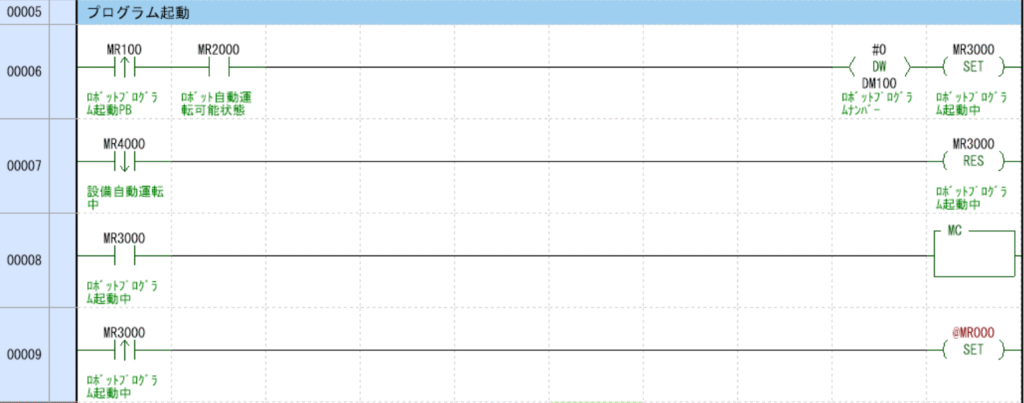
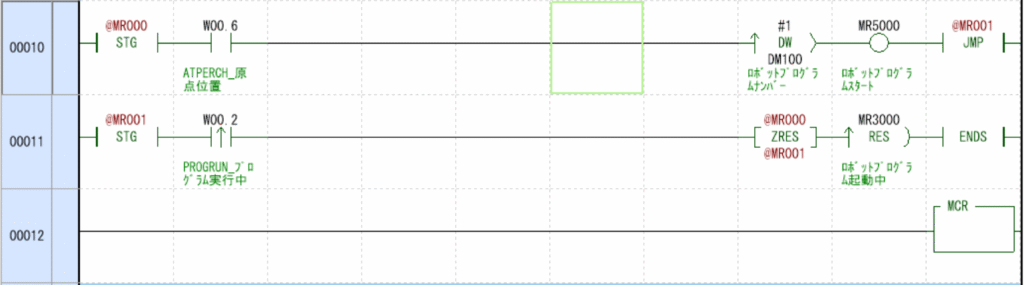
次にPLC側の制御ロジックです。
全体の構成イメージはこちら。
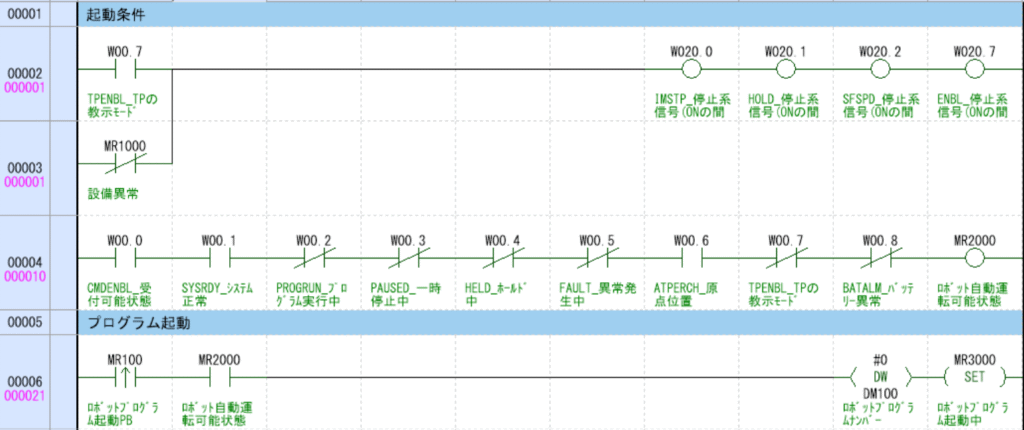
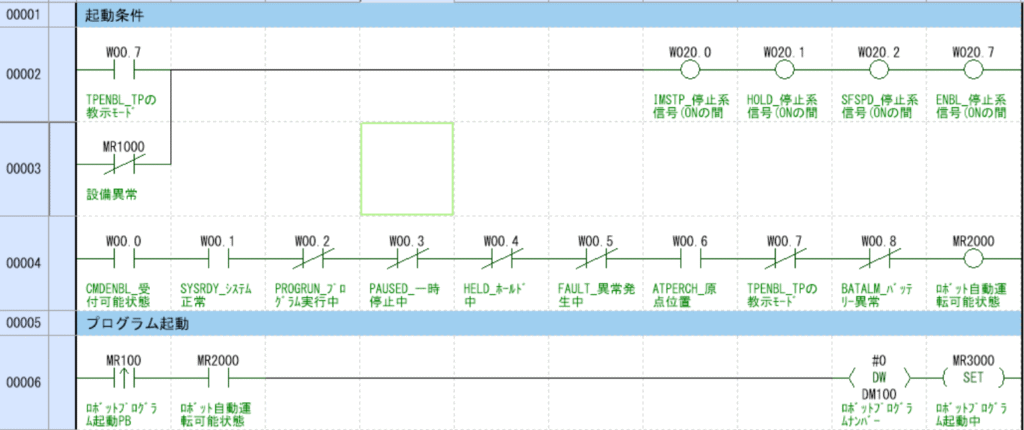
これらの条件が全て揃ったとき、
MR2000:ロボット自動運転可能状態がONします。
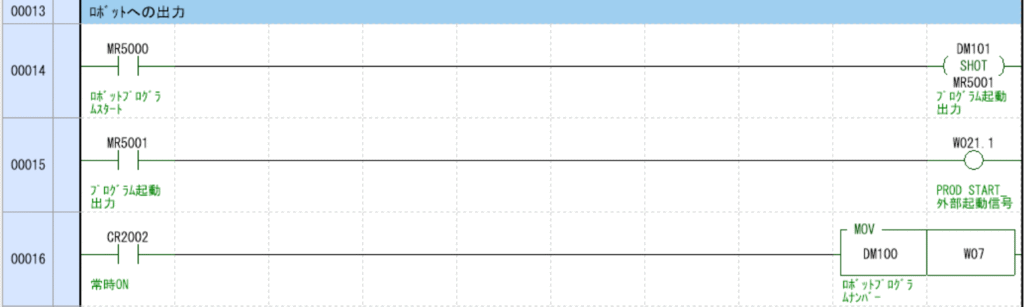
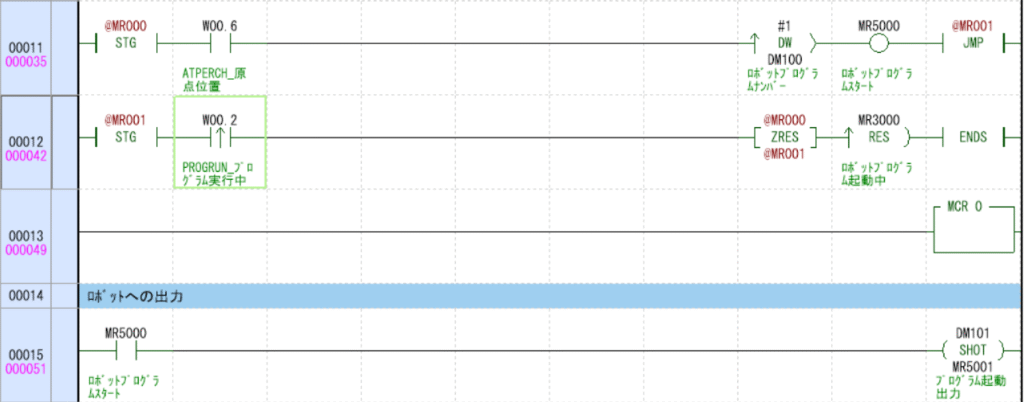
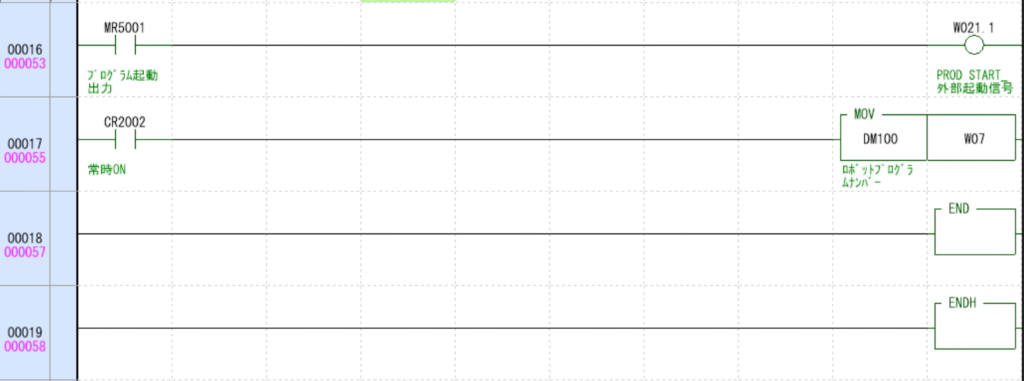
MR5000がON → MR5001がSHOTでON → DM101×10msec後にOFF。
この立下りをロボットが検出してプログラムを起動します。
ここまでの内容を整理すると──
✅ 「OTHER」方式は最もシンプルにPLCからロボットを起動できる
✅ メイン+サブ構成にすることで複数プログラムにも対応できる
✅ PLCラダーで異常監視とスタート条件を正しく組むことが重要
この方法を使えば、Fanucロボットの自動運転をPLC側から柔軟にコントロールできます。
実機の動作テストでも非常に安定して動くので、ぜひ一度試してみてください。
次回は 「ロボット側の異常をPLCで監視する方法」 を解説予定です。
異常発生時の自動停止フローまで構築できるようになりますのでお楽しみに!
STYLE方式も改めて見直すと意外と使いやすいので、用途によっては検討しても良いかもしれません。
また、OTHER以外の方式は今回触れていない部分もあるため、参考程度に捉えてください。